Position Control of Mobile Robots for Laser Material Processing¶
Features¶
The aim of this paper is to investigate and to compare different position control algorithms that have been designed for and implemented in a mobile robot
- Four different position control algorithms are compared with each other
P controller
PI controller
PID controller
Lyapunov controller
- These are analyzed on three different paths
Circular Path
Eight-shaped Path
Rectangular Path
Results¶
The results are shown for each of the thee different paths
Circular Path¶
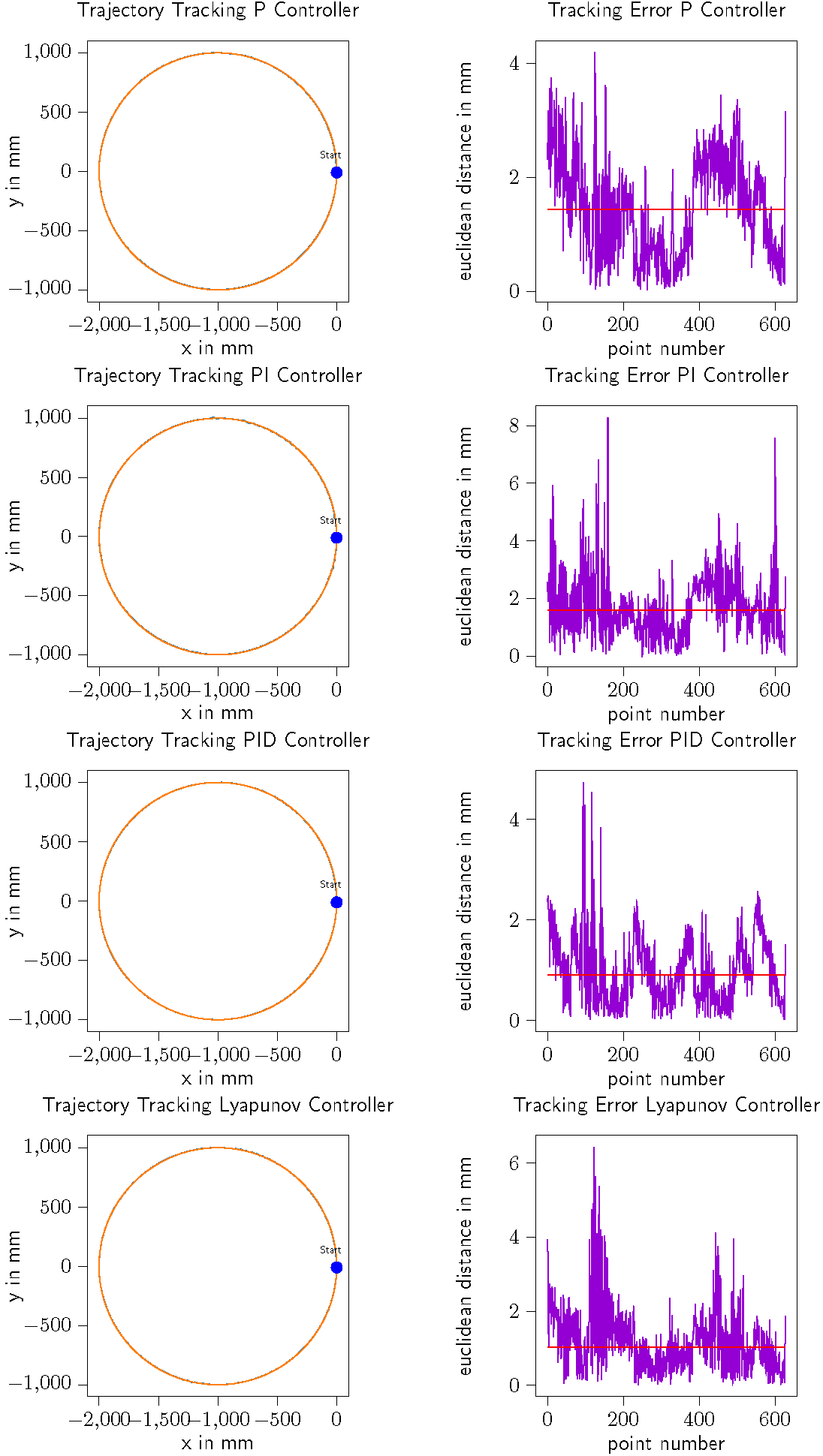
Results Circular Path¶
Summary of important numerical values of controller test on circular trajectory
metric |
P controller |
PI controller |
PID controller |
Lyapunov controller |
|---|---|---|---|---|
mean absolute error in mm |
1.45 |
1.76 |
0.997 |
1.196 |
median absolute error in mm |
1.443 |
1.558 |
0.908 |
1.032 |
share of points above 2 mm target in % |
27.866 |
34.076 |
9.554 |
13.535 |
minimal error in mm |
0.029 |
0.045 |
0.014 |
0.012 |
maximal error in mm |
4.19 |
8.284 |
4.734 |
6.43 |
Eight-shaped Path¶
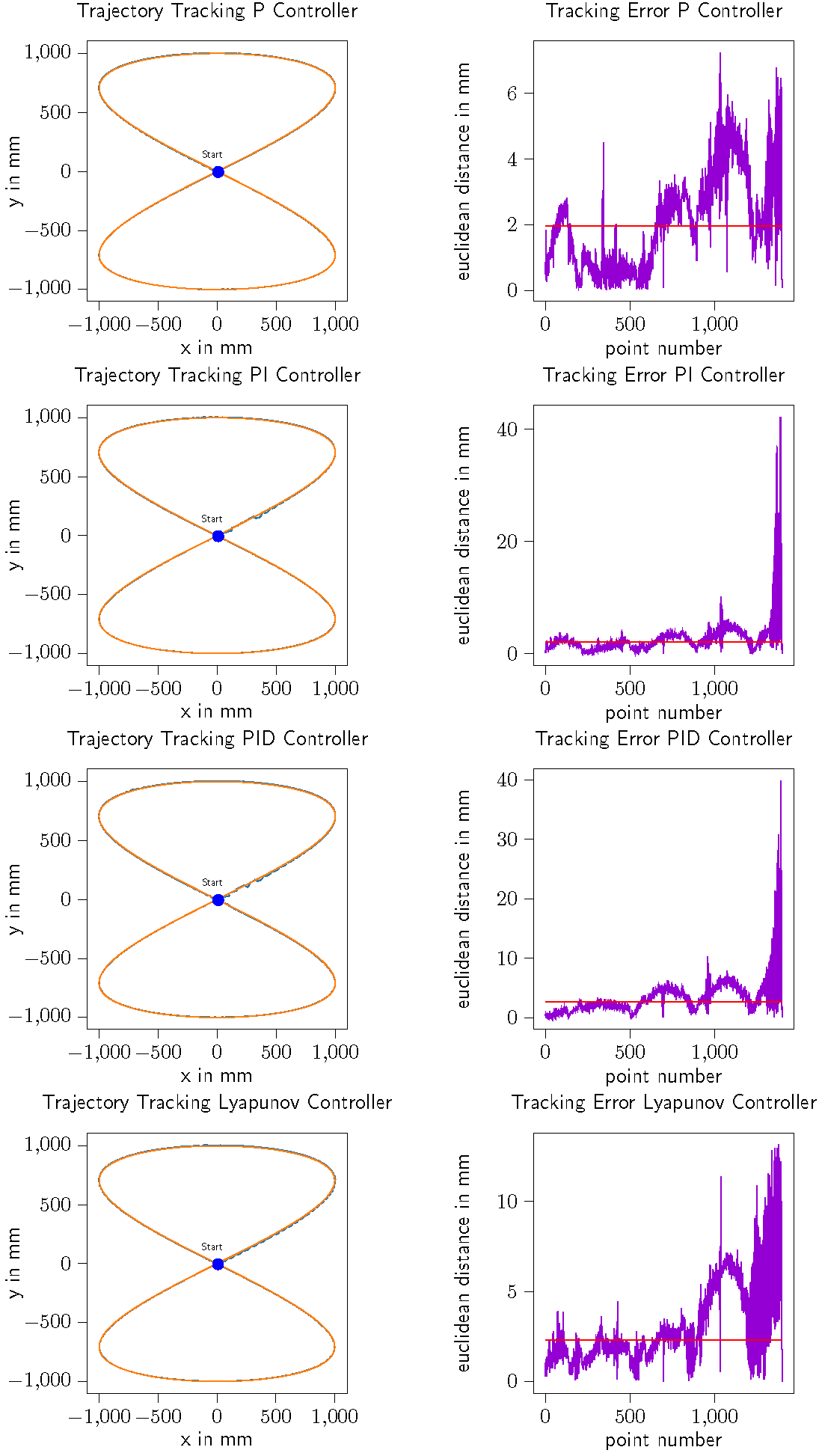
Results Eight-shaped Path¶
Summary of important numerical values of controller test on eight-shaped trajectory
metric |
P controller |
PI controller |
PID controller |
Lyapunov controller |
|---|---|---|---|---|
mean absolute error in mm |
2.101 |
2.791 |
3.445 |
3.175 |
median absolute error in mm |
1.966 |
2.116 |
2.648 |
2.306 |
share of points above 2 mm target in % |
49.535 |
53.753 |
64.618 |
58.756 |
minimal error in mm |
0.029 |
0.014 |
0.035 |
0 |
maximal error in mm |
7.237 |
42.218 |
39.812 |
13.155 |
Rectangular Path¶
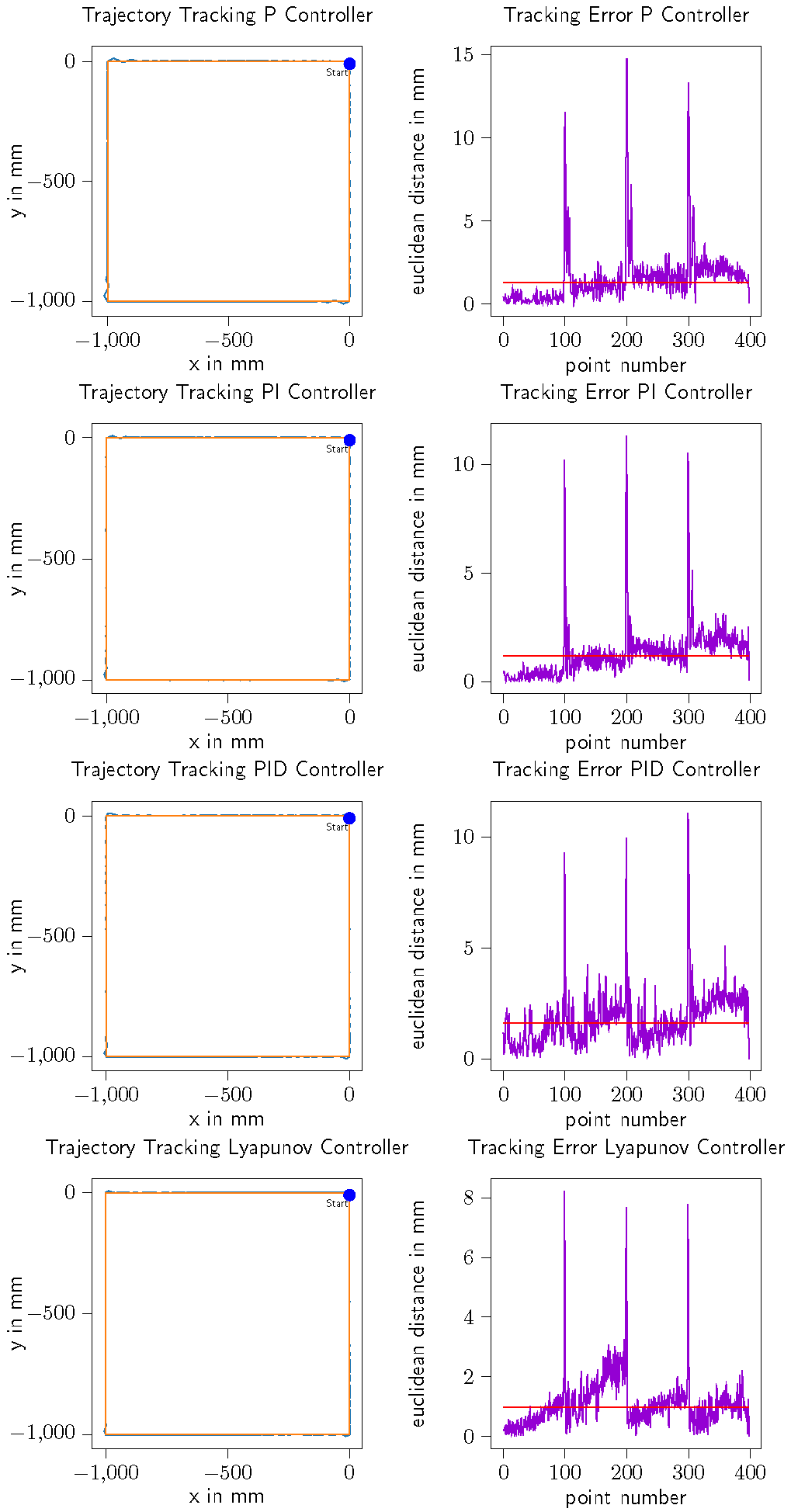
Results Square Path¶
Summary of important numerical values of controller test on square trajectory
metric |
P controller |
PI controller |
PID controller |
Lyapunov controller |
|---|---|---|---|---|
mean absolute error in mm |
1.588 |
1.314 |
1.781 |
1.095 |
median absolute error in mm |
1.311 |
1.172 |
1.604 |
0.971 |
share of points above 2 mm target in % |
23.81 |
13.874 |
39.348 |
9.774 |
minimal error in mm |
0.02 |
0.018 |
0 |
0.04 |
maximal error in mm |
14.78 |
11.321 |
11.077 |
8.237 |
Acknowledgements¶
Funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germanys Excellence Strategy – EXC-2023 Internet of Production – 390621612
The authors acknowledge the financial support by the Federal Ministry of Education and Research of Germany in the framework of Research Campus Digital Photonic Production (project number: 13N15423)
The authors would like to thank Prof. Jeremy Witzens and Dr. Florian Merget from the Institute and Chair of Integrated Photonics at RWTH Aachen University for their support.